多田隈教授等が開発したジャミング膜グリッパは、人の手のように多種多様な形状のモノや、鋭利なガラス破片でも自由につかむことができ、しかも高温・高圧に耐えるロボットの手である
【本技術の概要】
東北大学大学院情報科学研究科多田隈建二郎准教授等のグループは、極限の災害現場でも、へこたれず、タフに仕事ができる「ジャミング膜グリッパ(ロボットハンド、耐切創性式の柔剛切替グリッパ機構(Omni-Gripper)」を開発した。形や大きさがまちまちなものでもつかむことができる膜袋型で、袋自体に柔剛切替機能を持つ。柔剛切替機能は、袋膜間に粉体を充填する三層構造とし、粉体充填量を調節することより複雑な形状や脆弱な物体を傷つけることなくつかむことができる。
【本技術の特徴】
ロボットハンドでモノをつかむ動作に、柔剛を自由に切り替える機構としてジャミング転移を利用した方式を採用した。袋状構造の内部に粉体を封入し媒体である空気を抜くことで、粉体同士が接触して剛性を向上させることができた。

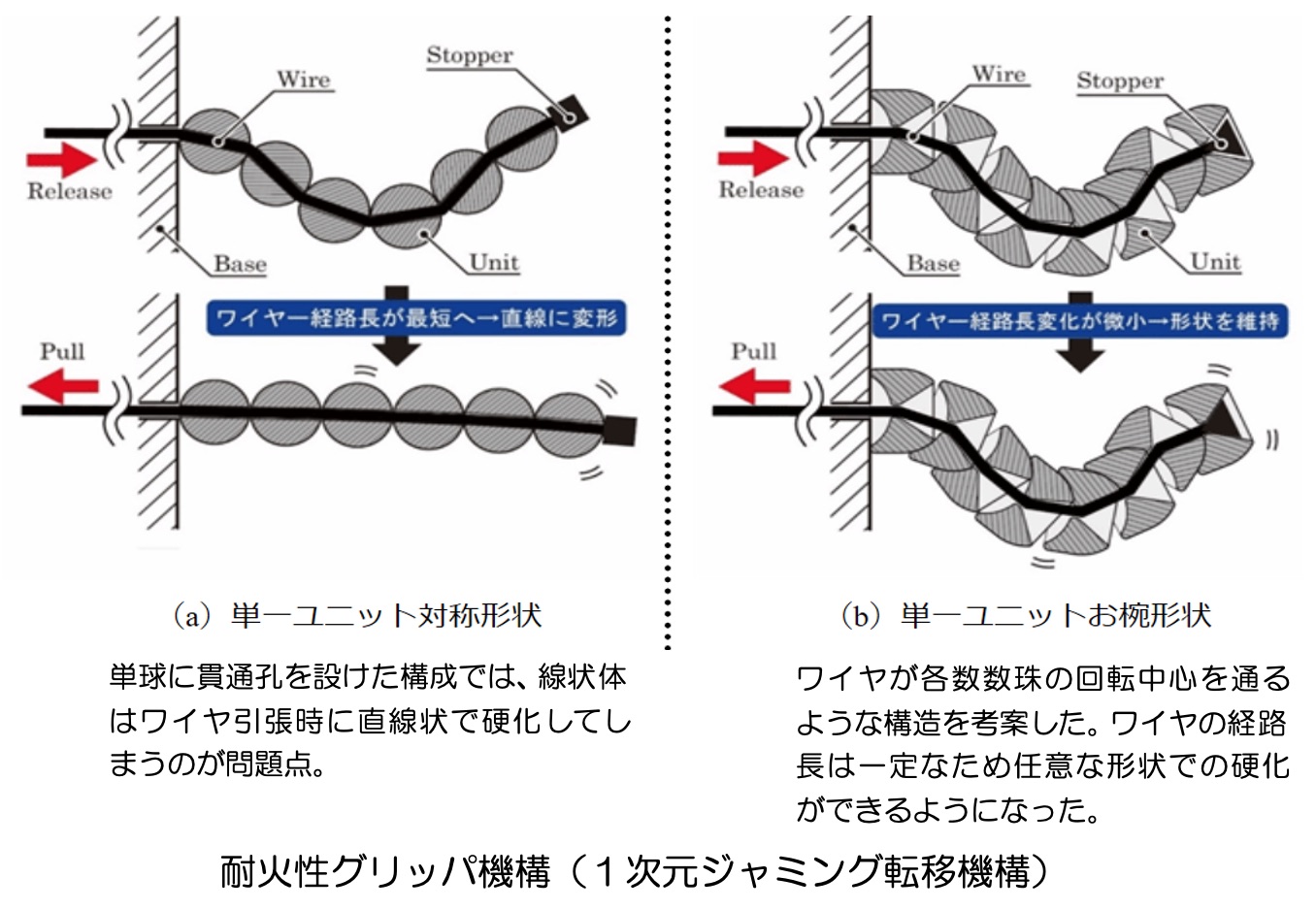
さらに、任意の形状を保持したまま硬化させる考え方から数珠状の構造を持った指を放射状に配置するアイディアが生まれた。数珠のビーズに耐火性の高い金属素材を用いることによって、耐久性のみならず、著しく高い耐火性をも実現することが可能となった。
① 尖った複雑形状の物体でもつかめる柔軟ロボットハンドを実現した
② 防刃生地を利用し「耐切創性・耐久性」と「柔軟性」を両立させた
③ どんな形でも容易につかめるため、災害現場での瓦礫把持はもとより、工場での作業効率化・生産性向上にも有効である
④ 多種多様な素材を使うことができるので、高剛性・耐熱性・耐薬品性・導電性・耐摩耗性・光透過性などに適したロボットハンドが構成できる
耐切創性に加え、耐火性の向上は、炎が存在する火災を含めた災害現場はもとより、工場における生産現場における柔軟ロボットハンドの実用性を飛躍的に高めるものである。今後、高剛性・耐熱性・耐薬品性・導電性・耐摩耗性・光透過性など多様な素材で構成ができることから広い活用が見込まれる。